Research
Our main research areas are rehabilitation and assistive robotics, bioinspired underwater actuation and sensing, autonomous mobile manipulation, and enhancement of image-guided surgery.
1. Rehabilitation and Assistive Robotics
A Multi-Award Winning Finger Orthosis


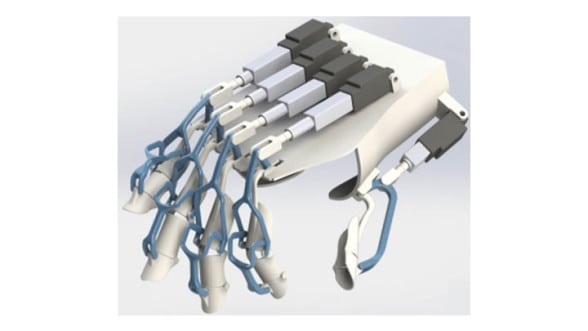
We aim to develop a portable and lightweight hand orthosis that accommodates individual’s anthropometric differences. We have invented a patented linkage mechanism that only requires one motor to drive the three joints of the human finger. We adopted a parametric approach to dynamically generate a 3D model using the user’s hand parameters. The whole orthosis is manufactured by 3D printing with only minimum assembly work. The current work focuses on applying this orthosis to patients with stiff fingers and human-machine interface for people with degenerative muscular diseases.
A Single DOF Leg Orthosis
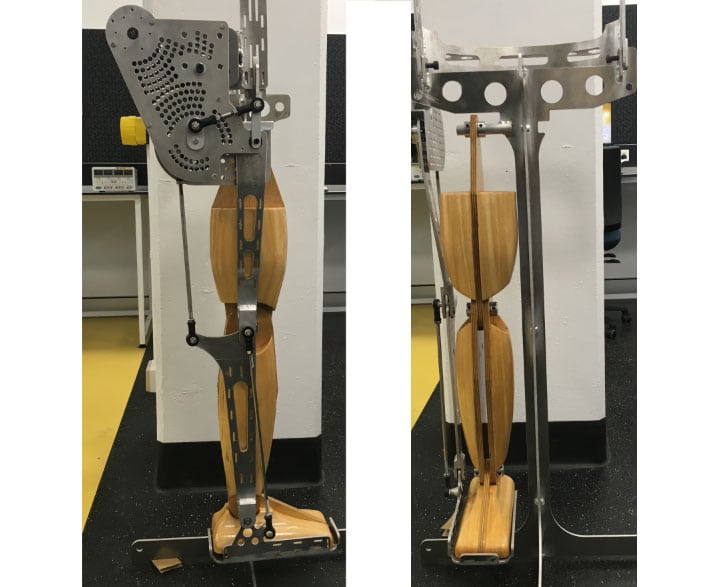
We aim to develop an active single DOF closed-loop leg orthosis that assists human walking. We have developed a prototype to mimic natural walking gait. We will optimize the dimensional and structural parameters of the robot and adopt passive dynamic walking into the exoskeleton, producing an energy-efficient orthosis with a natural human gait.
A Compact Robot for Upper Limb Rehabilitation
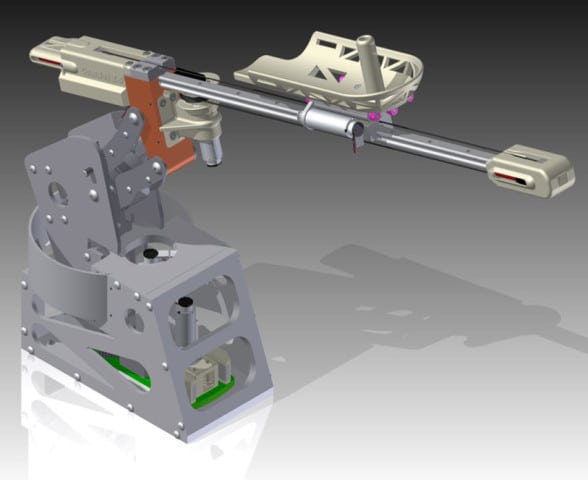
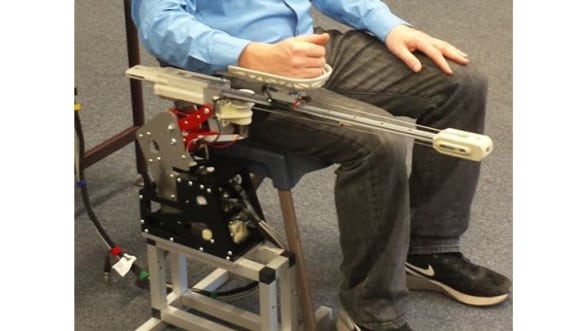
We developed an end-effector based robot for upper-limb rehabilitation training. Lightweight hybrid serial-parallel-cable design allows it to be compact while performing 3D shoulder and elbow trainings. The current work focuses on user-intention estimation using a 6-axis force/torque sensor at the end-effector and human-robot interaction for task specified training.
A 3-DOF Robot for Biomechanics Research
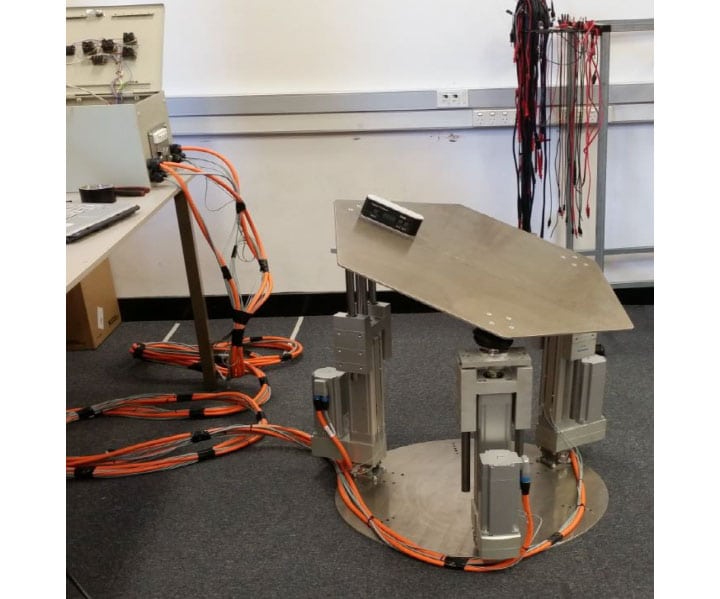
We developed a robot that provides multi-directional movements. This robot is able to allow a 100 kg user to experience a vertical travel of 300 mm, a maximum tilt angle of 24.9 degrees, at a maximum velocity of 200 mm/s and a maximum acceleration of 250 mm/s2, in a smooth automated travel path. The current work focuses on integrating the robot with an Oculus Rift 3D goggles to achieve total immersion for multiple applications, for example stance perturbations, autism, and motion sickness.
2. Bioinspired Underwater Actuation and Sensing
The World’s Fastest Robotic Fish
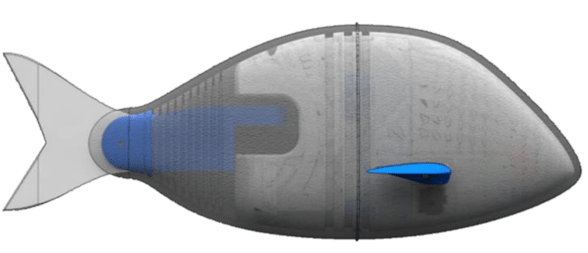
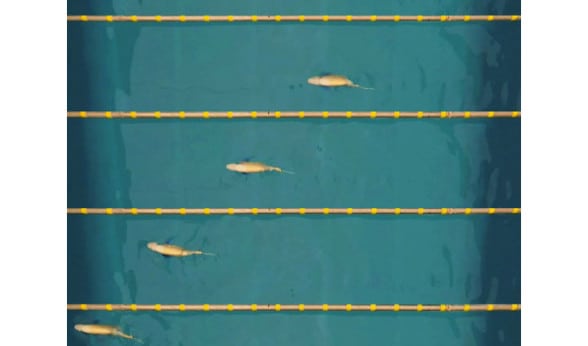
We developed the world’s fastest robotic fish in terms of body lengths per second. This robotic fish looks like, feels like, and swim like a black bream, a common biological fish in the Swan-Canning River. The robotic fish was designed in the principle of minimalist and achieved a maximum speed of 3 body lengths per second in water, beating the previous world record at 1.6 body lengths per second. The current work focuses on structural optimization of the skin and autonomous underwater navigation.
Underwater Electrosense in a 3D World
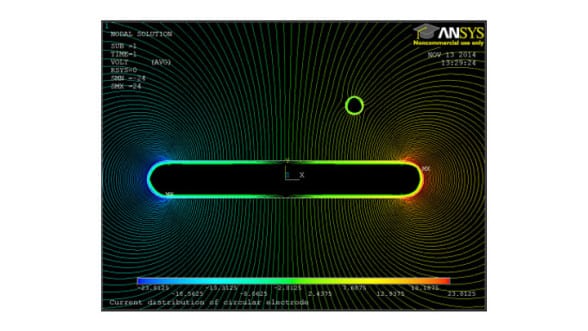
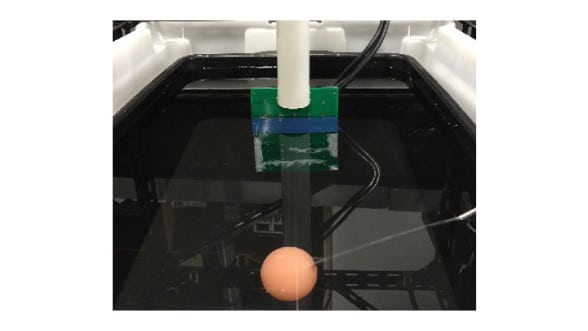
We aim to develop underwater short-range electrosense inspired by weakly electric fish, which generate an electric field with its electric organ and then process the returns from its electroreceptors to locate nearby objects. This omnidirectional underwater sensing functions in cluttered and dark environment in real-time, compensating for the shortcomings of current underwater computer vision systems. We for the first time applied the discrete dipole approximation (DDA) to underwater electrosense and developed prototypes and sensing algorithms for validation. We believe that this technology will find applications in medical engineering, as well as in robotic fish for autonomous navigation.
3. Autonomous Mobile Manipulation

Extending our expertise in dexterous manipulation accumulated from the DARPA Autonomous Robotic Manipulation (ARM) program, we are currently applying a system engineering approach to mobile manipulation by integrating autonomous navigation and manipulation, voice recognition, speech synthesis, and face recognition into a ROS-based seamless autonomous robotic system.
4. Enhancement of Image Guided Neurosurgery
Spine Surgery: Overcoming the “Line-of-Sight” Obstacles and Technique Refinements
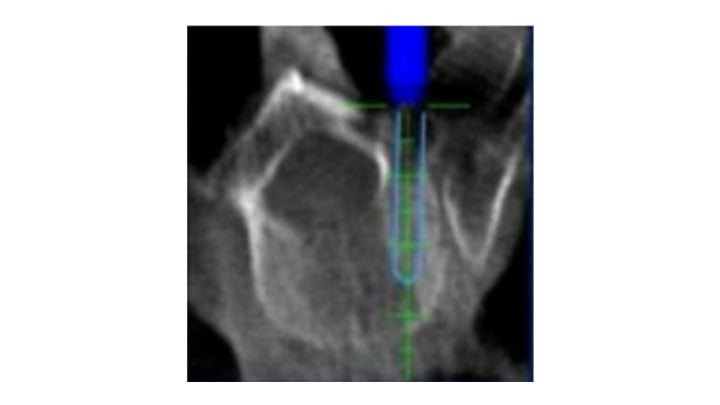
We aim to develop real-time sensing of navigational equipment used in brain and complex spine surgeries. In the spine, sub-millimetre accuracy is required to place fixation screws to minimise the chance of injuring critical nerve structures and blood vessels. However, the current systems largely rely on line of sight technologies, which may lead to unreliable navigation accuracy and intraoperative glitches. We are exploring a variety of sensing technologies to overcome these obstacles.